PID Loop Simulator - Features & Testimonials
Description | Features and testimonials | Demo Version
The video below shows the features of this tool and illustrates how to use the tool for loop tuning.
Features at a Glance
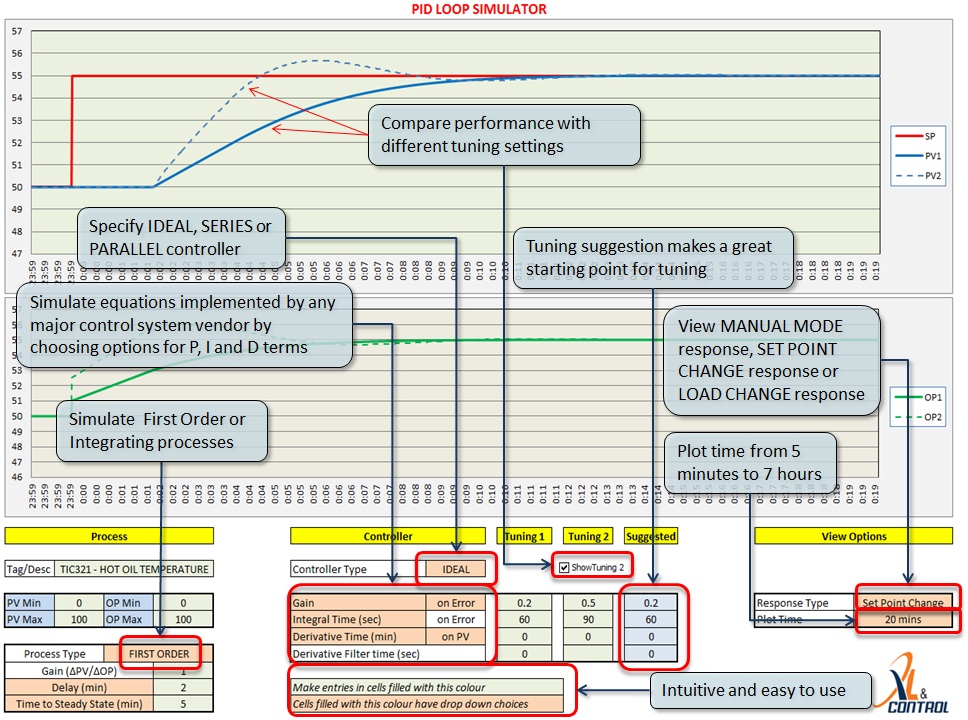
Features in Detail
- Due to the use of the familiar Excel spreadsheet environment,
this tool is intuitive and very easy to use. There is no complex
installation process, the tool only requires Microsoft Excel 2010 or
later. Uses can set various options using drop down boxes and data
entries into colour coded cells.
- Simulates First Order and Integrating Processes, the most
commonly encountered processes in the chemical process industry.
- Delay time can be provided in minutes or seconds.
- For first order processes, the speed of response can be provided
as Lag Time or time to steady state.
The time to steady state is defined as the time (after delay) taken
by the process value to reach >99% of its final value after a step
change in output. It is equal to 5 times the lag time. The use of this parameter saves the control
engineer time during a plant test as it is easier to work out from
the step response.
- The user can choose between simulators for Series, Parallel or
Integative PID algorithms depending on the control systems they work
with. Alternatively, they can also purchase a version that can
simulate all these algortims, which can be used to simulate PID algorithrms on
all major PLC and DCS systems. See
the purchase page for details.
The following equations show the Ideal, Parallel and Series (also known as Interacting) forms of the PID equations, with all terms calculated on error. Here, Kc = Controller Gain, Ti = Integral Time and Td = Derivative Time. OP(t) is the controller output as a function of time t and e(t) is the control error as a function of time t.
Ideal PID equation:

Parallel PID equation:

Series (Interacting) PID equation:

- Allows use of Proportional Band or Gain to specify controller
gain.
- Integral term can be specified either as Integral Time or
Integral Gain (also known as resets/time or repeats/time).
Units for integral time can be chosen between milliseconds, seconds or minutes.
Units for integral gain can be chosen between milliseconds-1, seconds-1 or minutes-1.
- Derivative Time can be provided in milliseconds, seconds or
minutes.
- Supports Derivative Filtering through specification of
Derivative Filter time
- Choose Proportional Action on Error or on Process Value (PV)
- Choose Derivative Action on Error or on Process Value (PV)
- Provides tuning suggestions that work as a good starting point
for tuning
- Allows comparison between two different controller tuning
settings
- Shows responses in manual mode and auto mode (set point change
and load change)
- Maximum plot time can be selected from 5 minutes to 7 hours.
- File is in .xlsx format (requires Excel verison 2010 or later),
no macros used
- Inexpensive: Due to the use of Excel as the platform for development, the software development costs are low, and hence this app is inexpensive compared to similar tools. Getting just one loop tuned well with this app will recover its cost many times over.
Testimonials
We are grateful to the following users who have sent their testimonials on the previous version of this tool. Users have also made great suggestions on the features.
If you like this tool, a short testimonial would be highly appreciated!
Testimonial received from Mr. Paul Singh, Chevron Corporation, Houston:
"The most user friendly and easiest to learn PID Loop Simulator!!"
Testimonial received from Mr. Michel Levesque, Sr I&C Tech., Tetra Tech Industries, Canada:
"I think "Advanced PID Loop Simulator" is an invaluable tool for anyone who wants to do loop tuning. This workbook application is simple to understand and very easy to use. I was also surprised by how well they respond to their customers needs. Their support team is very helpful and they always listen to my suggestions. Well, I'm very glad to help make this great workbook application even better. In my opinion, "PID Loop Simulator" is by far the best solution for loop tuning simulation."
Testimonial received from Mr. Tony Wylde-Browne, Senior Engineering Support Specialist:
"A clever spreadsheet for demonstrating PID and determining tuning parameters. Very effective training aid with sufficient flexibility built in to allow students to grasp the concept and witness PID loop response in a simulated environment, as well as the ability to generate suggested tuning parameters for tuning PID loops. Thanks Nitin appreciate your assistance”.
Testimonial received from Mr. Martin Kenkel, Germany (also see his testimonial for the System Identification Tool)
"The PID Loop Simulator should be mandatory for schools / training centers!!"